


Language:
")
")
Contracting Authority
![]()
Partners

"Dunarea de Jos" University of Galati
University "Politehnica" of Bucharest

Valahia University of Targoviste

University of Craiova
Estimated Results
- The optimal structure of the sensory system. Sensory system integrated into the mobile platform's driving system;
- The systemic model of the configuration of the sensory structure. The results of the functional simulation of the configuration of the sensory structure. Design specifications;
- Results of functional tests;
- Simulation platform that brings together 3 advanced technologies: Virtual Reality, HPS (Hybrid Process Simulation) and Cloud Computing technology;
- Dedicated interface for the transfer in virtual environment of data acquired from distributed sensors configurations and visual servoing systems;
- On-line software assets (build as of block functions) library;
- Real-time control structure of an assembly/disassembly line with integrated SAC-ARP and SAC-VAM, validated by testing on laboratory manufacturing lines;
- Reports with the results concerning model testing, via simulation of complex autonomous systems, CAS-PRA ans CAS-MAV integrated in medical and social assistive technologies and (Various Scenarios, Case Studies);
- Intelligent control structure, based on advanced techniques of CAS-PRA and CAS-MAV, integrated in medical and social assistive tecnologies and servicing precision flexible manufacturing lines, of assembling/disasembling an processing/reprocessing (mechatronic lines);
- Navigation structure based on ultrasounds and laser of CAS-PRA ands CAS-MAV;
- Mobile visual servoing located on the manipulators that equip CAS-PRA and CAS-MAV;
- Hybrid Petri Nets models for assembly/ disassembly flexible precision manufacturing lines, equipped with CAS-PRA, mobile robots (2DW/1FW, 2DW/2FW) and CAS-MAV, mobile robots 4DW/SW equipped with 6-DOF manipulator;
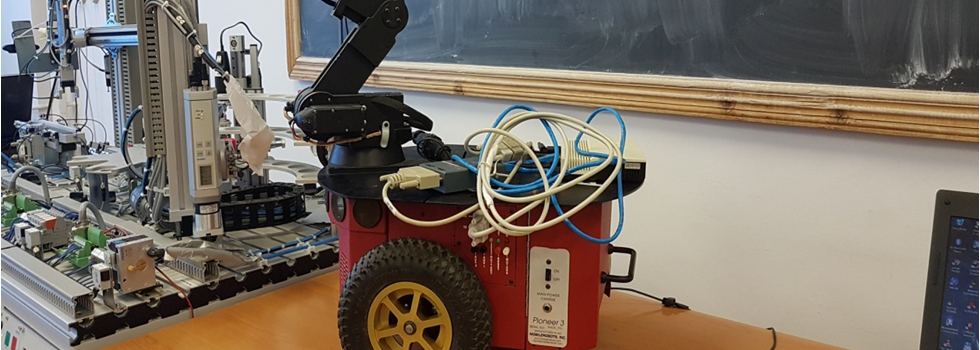
- Real time control structure of flexible precision manufacturing lines integrated in hybrid manufacturing technologies for A/D, CAS-PRA , Pioneer 3-DX, PeopleBot, PatrolBot, PowerBot, mobile robots (2DW/1FW, 2DW/2FW) equipped with 6-DOF Arm manipulator and CAS_MAV, (4DW/SW) mobile robots equipped with 6-DOF manipulator;
- Laboratory tests’ results of flexible precision manufacturing lines integrated in hybrid manufacturing technologies, assisted by CAS-PRA and CAS-MAV;
- Simulation results of the complex autonomous system CAS-IW integrated into the technology for assisting people with sever neuro-motor disabilities (CAS-IW modelled as a 2DW/2FW mobile robot + robotic arm with 7DOF);
- Functional model of intelligent control system and navigation system for "Cirrus Power Wheelchair" – as integral part of CAS-IW;
- Functional model of the real-time obstacle avoidance system (using the laser and video sensors) for the Cirrus Power Wheelchair - as integral part of the CAS-IW;
- Functional model of the advanced control system based on performance sensors and visual serving systems - for the Cyton 1500 integrated as part of the CAS-IW;
- The laboratory results of the intelligent control system, the navigation system (based on performance sensors) and the advanced control system based on real-time visual servoing systems for SAC-SI integrated into the technology for assisting people with severe neuro-motor disabilities.