


Language:
")
")
Contracting Authority
![]()
Partners

"Dunarea de Jos" University of Galati
University "Politehnica" of Bucharest

Valahia University of Targoviste

University of Craiova
Obiective
- Definirea, analiza, selecția și integrarea structurilor senzoriale în sistemul de conducere pentru platforma mobilă;
- Modelarea și simularea sistemului senzorial integrat;
- Proiectarea și testarea funcțională a sistemului senzorial integrat;
- Proiectarea Mediului Virtual de Dezvoltare (MVD) si implementarea acestuia la nivel de model experimental;
- Elaborarea modelelor funcționale ale sistemelor servoing vizuale utilizate în controlul liniilor mecatronice de precizie;
- Crearea si dezvoltarea unei biblioteci on-line de resurse software accesibila în cloud ca nivel SaaS;
- Modele cinematice şi dinamice ale sistemelor autonome complexe SAC-ARP şi SAC-VAM integrate in tehnologii de asistare medico-socială și deservire de linii fabricație flexibilă de precizie, de laborator (linii de mecatronică);
- Structuri de conducere inteligentă bazate pe tehnici de conducere avansate, a sistemelor autonome complexe SAC-ARP și SAC-VAM integrate in tehnologii de asistare și deservire;
- Sisteme de navigaţie ale sistemelor autonome complexe SAC-ARP și SAC-VAM integrate in tehnologii de asistare și deservire;
- Sisteme de poziţionare de precizie, bazate pe sistem video-servoing, a manipulatoarelor care echipează sistemele autonome complexe SAC-ARP și SAC-VAM;
- Testarea în timp-real, în regim de laborator, a structurilor de conducere si navigatie a sistemelor autonome complexe SAC-ARP și SAC-VAM;
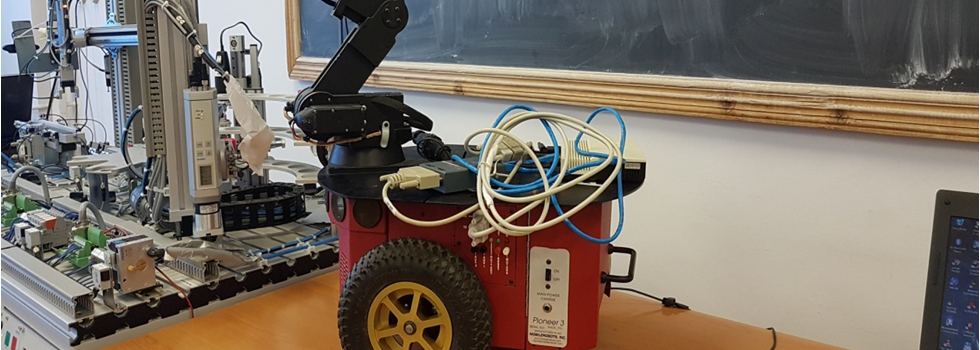
- Conducerea în timp real a liniilor de fabricație flexibilă de precizie, integrate în tehnologii hibride de fabricație de A/D, cu SAC-ARP, platformă robotică autonomă cu două roți motoare, una sau două roți libere și manipulator, și SAC-VAM, vehicul autonom cu 4 roți motoare multidirecționale și manipulator;
- Conducerea in timp real validată prin testare în laborator, a liniilor de asamblare/dezasamblare, asistate în procesul reversibil de reprelucare/dezasamblare de SAC integrate în tehnologii de asistare, SAC-ARP, roboti mobili (2DW/1FW, 2DW/2FW) echipați cu Manipulator 6-DOF Arm, și SAC-VAM, roboti mobili (4DW/SW) echipați cu Manipulator 6-DOF;
- Model cinematic şi dinamic pentru sistemul autonom complex SAC-SI integrat în tehnologia de asistare a persoanelor cu dizabilităţi neuro-motorii;
- Structură de conducere inteligentă pentru SAC-SI integrat în tehnologia de asistare a persoanelor cu dizabilităţi neuro-motorii severe;
- Sistem de navigaţie ce deserveşte SAC-SI integrat în tehnologia de asistare a persoanelor cu dizabilităţi neuro-motorii (bazat pe combinaţia dintre sistemul video-biometric al feţei şi al ochiului cu sistemul laser);
- Sistem video-servoing pentru manipulatorul integrat în sistemul autonom complex SAC-SI;
- Structură de conducere, de navigaţie şi de evitare a obstacolelor pentru sistemul autonom complex SAC-SI, integrat în tehnologia de asistare a persoanelor cu dizabilităţi neuro-motorii-implementată şi testată în condiţii de laborator.