


Language:
")
")
Contracting Authority
![]()
Partners

"Dunarea de Jos" University of Galati
University "Politehnica" of Bucharest

Valahia University of Targoviste

University of Craiova
Proiecte componente
Proiect 1 (Pr.1)
Denumire: Proiectarea, modelarea și simularea în funcționare a configuratiilor distribuite de senzori și sisteme servoing vizuale de pe sistemele autonome complexe (SAC-SI, SAC-ARP, SAC-VAM) destinate tehnologiilor de asistare personală medico-socială, intra/extra spital și acasă - link
Obiective:
- Definirea, analiza, selecția și integrarea structurilor senzoriale în sistemul de conducere pentru platforma mobilă;
- Modelarea și simularea sistemului senzorial integrat;
- Proiectarea și testarea funcțională a sistemului senzorial integrat.
Rezultate estimate:
- Structura optimă a sistemului senzorial.Sistemului senzorial integrat în sistemul de conducere al platformei mobilă;
- Modelul sistemic al configurației structurii senzoriale;Rezultatele simulării funcționale a configurația structurii senzoriale; Specificații de proiectare;
- Rezultatele testelor funcționale;
- Platformă de simulare care reunește 3 tehnologii avansate: tehnologia Virtual Reality.
Proiect 2 (Pr.2):
Denumire: Modelarea, simularea și implementarea configurațiilor distribuite de senzori și sisteme servoing vizuale destinate tenologiilor hibride pentru produse reutilizabile pe linii de fabricație flexibilă, de precizie, de laborator (linii de mecatronică) și industriale, cu sisteme autonome complexe integrate - link
Obiective:
- Proiectarea Mediului Virtual de Dezvoltare (MVD) si implementarea acestuia la nivel de model experimental;
- Elaborarea modelelor funcționale ale sistemelor servoing vizuale utilizate în controlul liniilor mecatronice de precizie;
- Crearea si dezvoltarea unei biblioteci on-line de resurse software accesibila în cloud ca nivel SaaS.
Rezultate estimate:
- Rezultatele testelor funcționale;
- Platformă de simulare care reunește 3 tehnologii avansate: tehnologia Virtual Reality, tehnologia SHP (Simularea Hibrida a Proceselor) și tehnologia Cloud Computing;
- Interfața specializată de preluare în mediu virtual a datelor de la configurații distribuite de senzori si de la sisteme servoing vizuale;
- Biblioteca on-line de resurse software implementata ca funcții bloc.
Proiect 3 (Pr.3):
Denumire: Conducerea inteligentă, cu tehnici avansate și navigatia bazată pe senzori performanți și sisteme servoing vizuale a sistemelor autonome complexe SAC-ARP și SAC-VAM integrate in tehnologii de asistare medico-socială și deservire de linii fabricație felxibilă de precizie, de laborator (linii de mecatronică) și industriale - link
Obiective:
- Modele cinematice şi dinamice ale sistemelor autonome complexe SAC-ARP şi SAC-VAM integrate in tehnologii de asistare medico-socială și deservire de linii fabricație flexibilă de precizie, de laborator (linii de mecatronică);
- Structuri de conducere inteligentă bazate pe tehnici de conducere avansate, a sistemelor autonome complexe SAC-ARP și SAC-VAM integrate in tehnologii de asistare și deservire;
- Sisteme de navigaţie ale sistemelor autonome complexe SAC-ARP și SAC-VAM integrate in tehnologii de asistare și deservire;
- Sisteme de poziţionare de precizie, bazate pe sistem video-servoing, a manipulatoarelor care echipează sistemele autonome complexe SAC-ARP și SAC-VAM;
- Testarea în timp-real, în regim de laborator, a structurilor de conducere si navigatie a sistemelor autonome complexe SAC-ARP și SAC-VAM.
Rezultate estimate:
- Structură de conducere in timp real a liniei de asamblare/dezasamblare cu SAC-ARP și SAC-VAM integrate, validată prin testare pe linii de fabricație de laborator;
- Rapoarte cu rezultatele testării modelelor sistemelor autonome complexe SAC-ARP și SAC-VAM integrate în tehnologii de asistare medico-socială in regim de simulare (scenarii diverse, studii de caz);
- Structură de conducere inteligentă bazată pe tehnici avansate a SAC-ARP și SAC-VAM integrate în tehnologii de asistare medico-socială şi în tehnologii de deservire de linii fabricație flexibilă de precizie, de A/D și de P/R, de laborator (linii de mecatronică);
- Structură de navigație bazată pe ultrasunete și laser a SAC-ARP și SAC-VAM, integrate în tehnologii de asistare personală medico-socială şi deservire de linii fabricație flexibilă de precizie, de laborator (linii de mecatronică);
- Sistem servoing vizual mobil plasat pe manipulatoarele care echipează SAC-ARP și SC-VAM;
- SAC-ARP si SAC-VAM integrate în tehnologia de asistare personală intra/extra spitalicescă;
- SAC-VAM testat în acţiuni de salvare în teren accidentat;
- SAC-ARP și SAC-VAM integrate într-o tehnologie hibridă de deservire linii de fabricație flexibilă de precizie, de A/D si P/R, in regim de laborator.
Proiect 4 (Pr.4):
Denumire: Modelarea, simularea și conducerea în timp real a liniilor de fabricație asistate de sisteme autonome complexe (SAC-ARP, SAC-VAM) integrate în tehnologii hibride de fabricație flexibilă de precizie, de laborator (linii de mecatronică) și industriale, pentru produse reutilizabile - link
Obiective:
- Conducerea în timp real a liniilor de fabricație flexibilă de precizie, integrate în tehnologii hibride de fabricație de A/D, cu SAC-ARP, platformă robotică autonomă cu două roți motoare, una sau două roți libere și manipulator, și SAC-VAM, vehicul autonom cu 4 roți motoare multidirecționale și manipulator;
- Conducerea in timp real validată prin testare în laborator, a liniilor de asamblare/dezasamblare, asistate în procesul reversibil de reprelucare/dezasamblare de
SAC integrate în tehnologii de asistare, SAC-ARP, roboti mobili (2DW/1FW, 2DW/2FW) echipați cu Manipulator 6-DOF Arm, și SAC-VAM, roboti mobili (4DW/SW) echipați cu Manipulator 6-DOF.
Rezultate estimate:
- Modele cu Rețele Petri Hibride (RPH) pentru linii de fabricație flexibilă de precizie, de asamblare / dezasamblare, deservite de SAC-ARP, roboți mobili (2DW/1FW, 2DW/2FW) și SAC-VAM vehicul autonom multidirectional (4DW/SW) echipați cu Manipulator 6-DOF Arm;
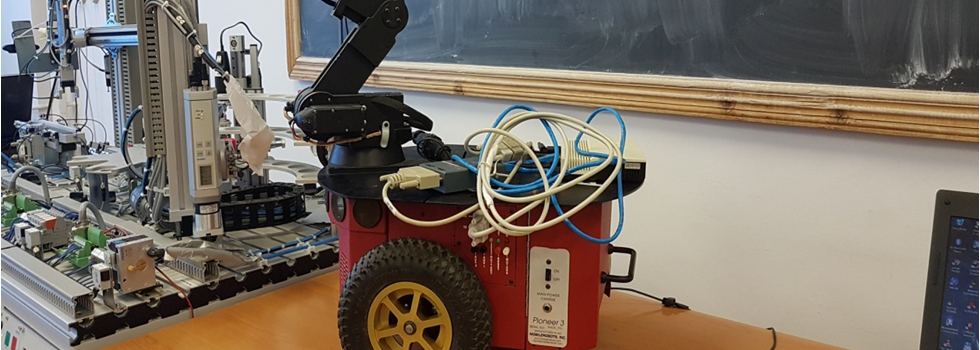
- Structura de conducere în timp real a liniilor de fabricatie de precizie, integrate în tehnologii hibride de fabricație pentru A/D, asistate în procesul reversibil de dezasamblare de SAC integrate în tehnologii de asistare, SAC-ARP, roboti mobili Pioneer 3-DX, PeopleBot, PatrolBot, PowerBot(2DW/1FW, 2DW/2FW) echipat cu Manipulator 6-DOF Arm și SAC-VAM, roboti mobili (4DW/SW) echipați cu Manipulator 6-DOF;
- Rezultate alte testării în laborator ale conducerii liniilor flexibile de fabricație integrate în tehnologii hibride de fabricație flexibilă de precizie, asistate de SAC-ARP și SAC-VAM.
Proiect 5 (Pr.5)
Denumire: Conducerea inteligentă, cu tehnici avansate și navigatia bazată pe senzori performanți, sistem video-biometric și sistem servoing vizual a sistemului autonom complex SAC-SI integrat in tehnologia de asistare a persoanelor cu dizabilitati neuro-motorii severe - link
Obiective:
- Model cinematic şi dinamic pentru sistemul autonom complex SAC-SI integrat în tehnologia de asistare a persoanelor cu dizabilităţi neuro-motorii;
- Structură de conducere inteligentă pentru SAC-SI integrat în tehnologia de asistare a persoanelor cu dizabilităţi neuro-motorii severe;
- Sistem de navigaţie ce deserveşte SAC-SI integrat în tehnologia de asistare a persoanelor cu dizabilităţi neuro-motorii (bazat pe combinaţia dintre sistemul video-biometric al feţei şi al ochiului cu sistemul laser);
- Sistem video-servoing pentru manipulatorul integrat în sistemul autonom complex SAC-SI;
- Structură de conducere, de navigaţie şi de evitare a obstacolelor pentru sistemul autonom complex SAC-SI, integrat în tehnologia de asistare a persoanelor cu dizabilităţi neuro-motorii - implementată şi testată în condiţii de laborator.
Rezultate estimate:
- Testarea prin simulare a sistemului autonom complex SAC-SI integrat in tehnologia de asistare a persoanelor cu dizabilitati neuro-motorii (platformă mobilă cu doua roti motoare si doua roti libere - 2DW/2FW + brat robotic cu 7DOF);
- Rapoarte cu rezultatele testarii sistemului autonom complex CAS-SI integrat in tehnologia de asistare a persoanelor cu dizabilitati neuro-motorii - in regim de simulare (scenarii diverse, studii de caz);
- Model funcţional al structurii de conducere inteligentă si navigatie a scaunului cu rotile de tip ”Cirrus Power Wheelchair” - parte integrantă din SAC-SI;
- Model funcţional al structurii de evitare a obstacolelor în timp real (formată din senzori de tip laser si video) pentru scaunul cu rotile de tip ”Cirrus Power Wheelchair”- parte integrantă din SAC-SI;
- Model funcţional al structurii de conducere avansată bazată pe senzori performanţi si sisteme servoing vizuale - pentru manipulatorul Cyton 1500 parte integrată din SAC-SI;
- Rezultatele testării în laborator ale structurii de conducere inteligentă, ale structurii de navigaţie (bazată pe senzori performanți) şi ale structurii de conducere avansată bazată pe sisteme servoing vizuale în timp real a SAC-SI integrat în tehnologia de asistare a persoanelor cu dizabilităţi neuro-motorii severe.